This is an advanced graduate course that deals with classical (or geometric) and deep learning methods in computer vision. This course starts by exploring the mathematical foundations of computer vision and advances to the recent deep learning methods. The course objective is to introduce formal tools in perception for students who are interested in Robot Autonomy and 3D Perception.
The University of Colorado Boulder’s HAQ Lab is developing RALPH-E 3, an autonomous rover designed to monitor methane emissions in landfills while navigating challenging terrains. This capstone project emphasizes robust mobility, reliable sensor integration, and autonomous operation to provide a mobile solution for landfill gas monitoring.
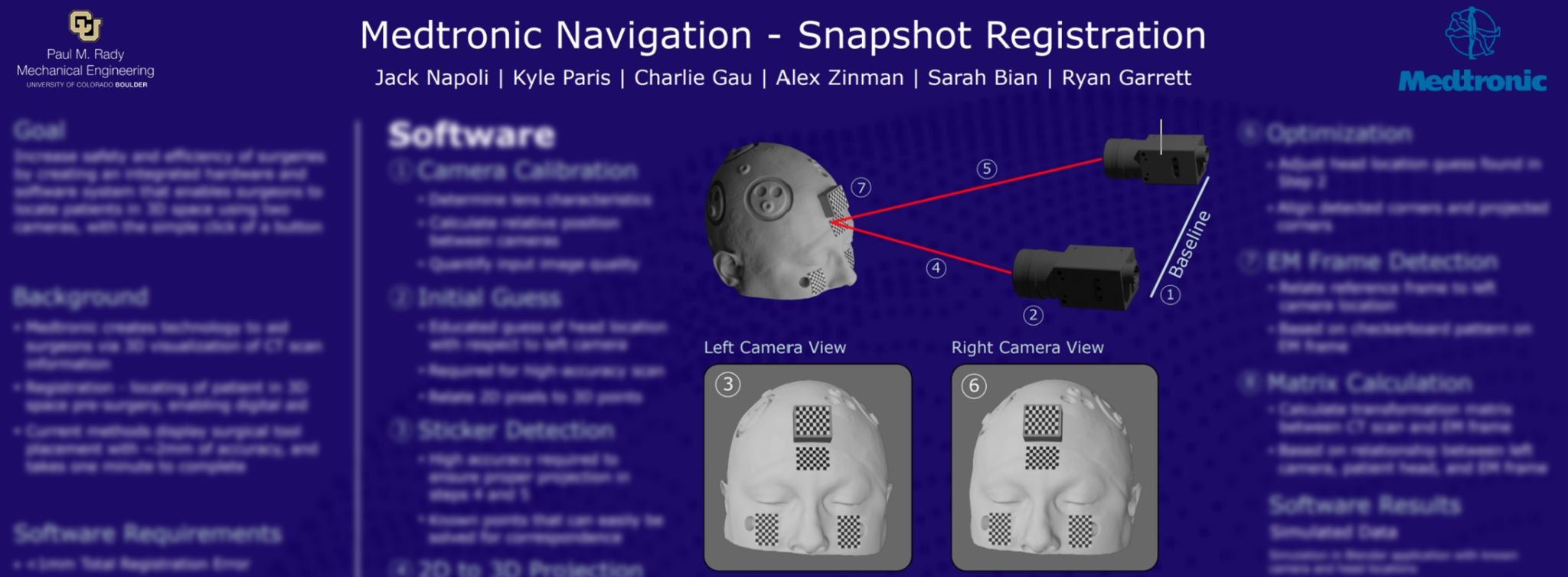
Touchless camera-based registration enhances surgical accuracy by reducing reliance on multiple 3D scans and minimizing patient contact.
These efforts focus on single-snapshot stereo methods using optical-target and geometry-based approaches.
This is an advanced graduate course that deals with classical (or geometric) and deep learning methods in computer vision. This course starts by exploring the mathematical foundations of computer vision and advances to the recent deep learning methods. The course objective is to introduce formal tools in perception for students who are interested in Robot Autonomy and 3D Perception.
For previous courses offered by Chahat Deep Singh, please visit here.